Modellbahn
Tricks &Tipps

|
|
Modellbahn
|
|
Ich weiß ja, dass über Conrad Weichenantriebe schon viel geschrieben
wurde und bei manchen offensichtlich ein Glaubenskrieg ausgefochten
wird.
Unzweifelhaft ist der Antrieb eine der preiswertesten Möglichkeiten, Weichen zu
stellen. Mit Schaltdecodern von IEK, wie ich sie verwende, kostet ein
kompletter Weichenantrieb einschließlich Decoder- und Versandanteil nur
um die 14 Euro. Das ist enorm!
Andererseits müssen die Dinger funktionieren. Hier hat es offensichtlich
in der Vergangenheit "Flurschaden" gegeben.
Mir scheint, dass der Hersteller - vermutlich aus China, möglicherweise
auch die Firma Hoffmann, oder die importiert wieder aus China??? -
zwischenzeitlich sein Produkt verbessert hat, wie ich verblüfft
feststellte, als ich einen der letzten der von mir gekauften Antriebe öffnete.
Die neueren Antriebe haben plötzlich einen Vorwiderstand und einen
Entstörkondensator sowie ein schwarzes Teil parallel zum Motor, dessen
Funktion ich nicht entschlüsseln konnte. Frühere Erfahrungen mit
Vorgängermodellen sind also wohl überholt.
Egal - ich habe mal (anscheinend erfolgreich) versucht, diese Dinger zu
optimieren und hier das Ergebnis:
Und bevor Sie jetzt weiterlesen, weise ich schon mal darauf hin, dass möglicherweise alles, was nun kommt, überholt ist. Warum das so ist, steht ganz unten in diesem Artikel!!!
![]()
1. Merkwürdigerweise haben die Chinamänner zwei Vorwiderstände eingebaut
mit zusammen 21,5 Ohm. Warum zwei hintereinander? Auch egal - durch die
Widerstände arbeitet der Motor nicht so ruckartig und es knallt nicht ganz
so am Endanschlag. Aber:
Es kann ja mal passieren, dass der Stelldraht sich im extra gebohrten
Loch nicht frei bewegen kann mit der Folge, dass die Endabschalter nicht
funktionieren. Wenn aber der Motor Dauerstrom kriegt, fängt der
Widerstand von 16 Ohm und 0,25 Watt Belastung zu qualmen an.
Nicht gut!
Außerdem brummt der Antrieb dann ständig - die ältere Version mehr als
die neuere. Auch nicht gut.
Und das laute Klacken beim Schalten ist zwar nicht ungewöhnlich aber -
genau: Auch nicht gut.
Also fangen wir an und schrauben wir das gute Stück mal auf.
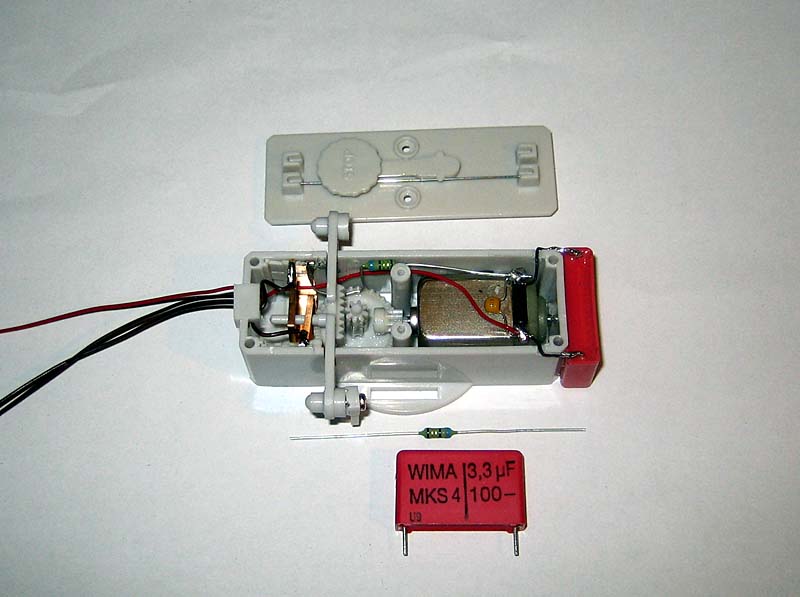 Rechts
ein Bild, wie es hinterher aussah (Klicken Sie mal drauf!):
Rechts
ein Bild, wie es hinterher aussah (Klicken Sie mal drauf!):
1. Die beiden Widerstände habe ich ausgelötet und durch einen einzelnen
von 33 Ohm ersetzt - belastbar mit 1 Watt.
2. Der höhere Widerstand war möglich, da ich zusätzlich zum Entstörkondensator
einen größeren Kondensator 63V / 3,3 µF
eingelötet habe. Dadurch wird die stark pulsierende
Gleichspannung am Motor erheblich geglättet, der Motor zieht besser und
verträgt einen höheren Vorwiderstand.
Das wiederum mindert entsprechend das
Brummgeräusch, wenn mal der Endschalter nicht korrekt arbeitet. Der
Strom fließt dann mit 95 mA, also wirklich so wenig, dass man es
vernachlässigen kann. Am Widerstand fallen etwa 3V ab, also entsteht
eine Wärmelast von etwa 0,3 Watt.
Und noch besser ist es, wenn Sie den Vorwiderstand außerhalb des
Gehäuses in die rote Leitung einlöten. Auch eine Wärmebelastung von nur
0,3 Watt kann in einem geschlossenen Gehäuse nicht abfließen und führt
zu einem Wärmestau bei Dauerbelastung.
Übrigens kann man hier natürlich keinen Elektrolyt-Kondensator verwenden, weil der Motor ja mit jedem Schaltvorgang die Polarität wechselt.
Der verbaute Kondensator ist ziemlich groß und
findet keinen Platz im Gehäuse. Er wurde außen dran geklebt und die
beiden Leitungen durch zwei Kerben am oberen Gehäuserand zum Motor
geführt.
Bei Reichelt gibt es den Kondensator unter der Nr. "WIMA MKS-4 3,3
µF" für 66 Cent.
Und wenn man jetzt den Antrieb wieder zuschraubt, erkennt man ihn nicht
wieder:
Er schaltet geräuscharm
er brummt fast nicht mehr
es verkohlt kein Widerstand
- es macht einfach Freude.
Die ganze Story klingt viel komplizierter als sie war/ist:
Für den
Umbau eines Antriebs braucht es nicht mehr als 10 Minuten.
Übrigens:
Für diese Art von Antrieben benötigen Digital-Bahner immer Schaltdecoder
- das sind die mit
den 4 Mini-Relais auf der Platine.
Normale Magnetartikeldecoder geben Gleichspannung aus, und damit dreht
der Getriebemotor nur in eine Richtung aber nicht wieder zurück.
![]()
Etwa ein Jahr, nachdem ich diesen Artikel geschrieben hatte, schickte mir Ralf Polozcek von IEK einen neuen Decoder, den er ganz speziell für die Conrad/Hoffmann Antriebe konstruiert hatte. Ich habe ihn ausprobiert, und mit ihm geht nun alles anders im Sinne von "besser":
Der Decoder liefert nur einen Stromstoß von maximal
einer Sekunde Dauer an den Antrieb. Wenn also dessen interner
Endschalter mal nicht öffnet (weil z. Bsp. der Stelldraht an der Wand
der Bohrung nach oben anschlägt), so wird der Antrieb dennoch nicht
brummen oder heiß werden.
Die Abschaltzeit kann an der Zentrale bis auf 0,2 Sek verkürzt werden.
Der Decoder liefert Gleichstrom an den Antrieb, und durch die interne Transistorstufe wird die Spannung etwas reduziert. Beides verringert das Schaltgeräusch.
Die Adressen der vier Antriebe sind frei wählbar - müssen also nicht aufeinander folgen.
Bei Verwendung dieses Decoders wird also die ganze oben
beschriebene Optimierung überflüssig!
Für Servo-Antriebe ist der Decoder allerdings nicht brauchbar!
Der "MWD-1" (Motor-Weichendecoder) ist seit Nov. 2008
lieferbar,
Und dabei darf ich versichern, weder am Betriebsergebnis beteiligt zu
sein noch Provision zu kriegen.
![]()
Noch ein nützlicher Tipp:
Ich hatte geschrieben, mal solle das Schaltgeräusch verringern durch
einen davor geschalteten Widerstand. Das ist aber nicht der beste Weg, um
die Spannung zu reduzieren!
Da der MWD-1 auch für einen anderen Antrieb
funktionieren soll, der volle 16 Volt benötigt, kann er nicht schon
intern die abgegebene Spannung reduzieren.
Wer ausschließlich Conrad-Antriebe einsetzt, wird die mit 11-12 Volt
betreiben können bei gleicher Sicherheit aber weniger Krach.
Die Spannungsreduzierung erreicht man am elegantesten durch eine
"anti-parallel geschaltete Diodenkaskade" - klingt toll, was???
So ein Teil besteht ganz einfach aus 12 Standard-Dioden
zum Gesamtpreis von 48 Ct. Zwei Stränge von je 6 Stück werden
hintereinander gelötet (die Durchlassrichtung zeigt immer zur gleichen
Seite!), und dann werden diese beiden Stränge "verdreht" parallel
verlötet. So kann der Wechselstrom entweder durch den einen oder den
anderen Strang fließen, aber immer muss er durch 6 Dioden, die einen
Spannungsabfall von 6 x 0,7 = 4,2 Volt verursachen.
Dazu die
Transistorstufe des Decoders führt dann zu einer Motorspannung von etwa 11
Volt. Das reicht aus und ist schön leise. Sie brauchen diese
Diodenkaskade nur ein einziges Mal zu löten und gehen von dort mit dem
gelben Draht zu allen MWD-1 Decodern Ihrer Anlage.
Wenn Sie wie bisher Schaltdecoder haben, gehen Sie statt dessen mit dem
gelben Draht an alle Antriebe - rotes Kabel.
Sie haben durch die Kaskade einfach eine stabile Wechselspannung von 11
Volt zur Verfügung, die auch nicht zusammenbricht, wenn mehrere Antriebe
gleichzeitig schalten sollen.
Man sieht: Es gibt immer wieder etwas Neues!